
Filter by
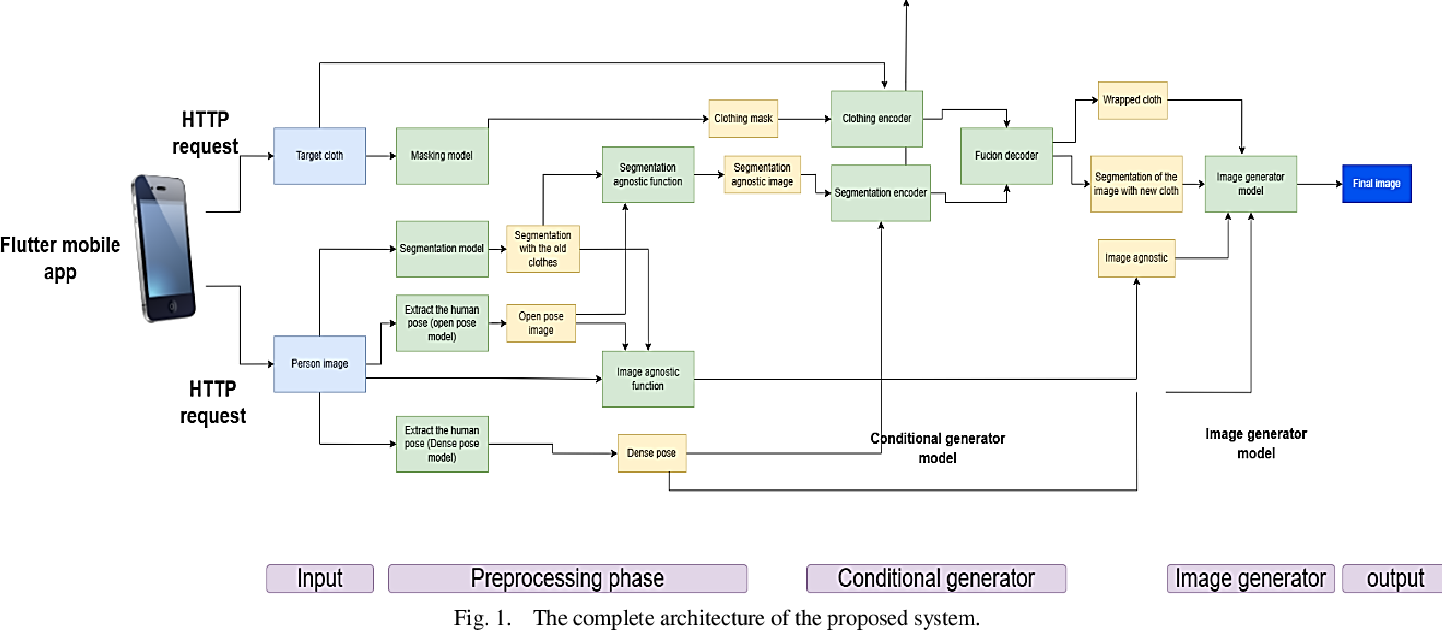
A Cost-Efficient Approach for Creating Virtual Fitting Room using Generative Adversarial Networks (GANs)
Customers all over the world want to see how the clothes fit them or not before purchasing. Therefore, customers by nature prefer brick-and-mortar clothes shopping so they can try on products before purchasing them. But after the Pandemic of COVID19 many sellers either shifted to online shopping or closed their fitting rooms which made the shopping process hesitant and doubtful. The fact that the
Anomaly-Based Intrusion Detection for Blackhole Attack Mitigation
In the contemporary environment, mobile ad hoc networks (MANETs) are becoming necessary. They are absolutely vital in a variety of situations where setting up a network quickly is required; however, this is infeasible due to low resources. Ad hoc networks have many applications: education, on the front lines of battle, rescue missions, etc. These networks are distinguished by high mobility and
Apache Spark Powered: Enhancing Network Intrusion Detection System Using Random Forest
The increasing sophistication of cyber attacks necessitates effective intrusion detection systems. We propose a novel intrusion detection method integrating deep learning with big data management using Apache Spark. Leveraging the comprehensive CSE-CIC-IDS2018 dataset, we apply extensive data preprocessing, including handling missing and unreliable values, duplicates, and redundant columns. In
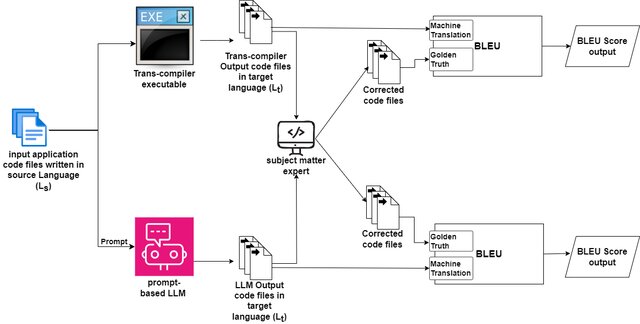
Trans-Compiler-Based Conversion from Cross-Platform Applications to Native Applications
Cross-platform mobile application development is emerging widely in the mobile applications industry. Cross-platform Frameworks (CPFs) like React Native, Flutter, and Xamarin are used by many developing companies. The technology these frameworks use faces performance and resource use efficiency limitations compared to native applications. The native applications are written in the native languages
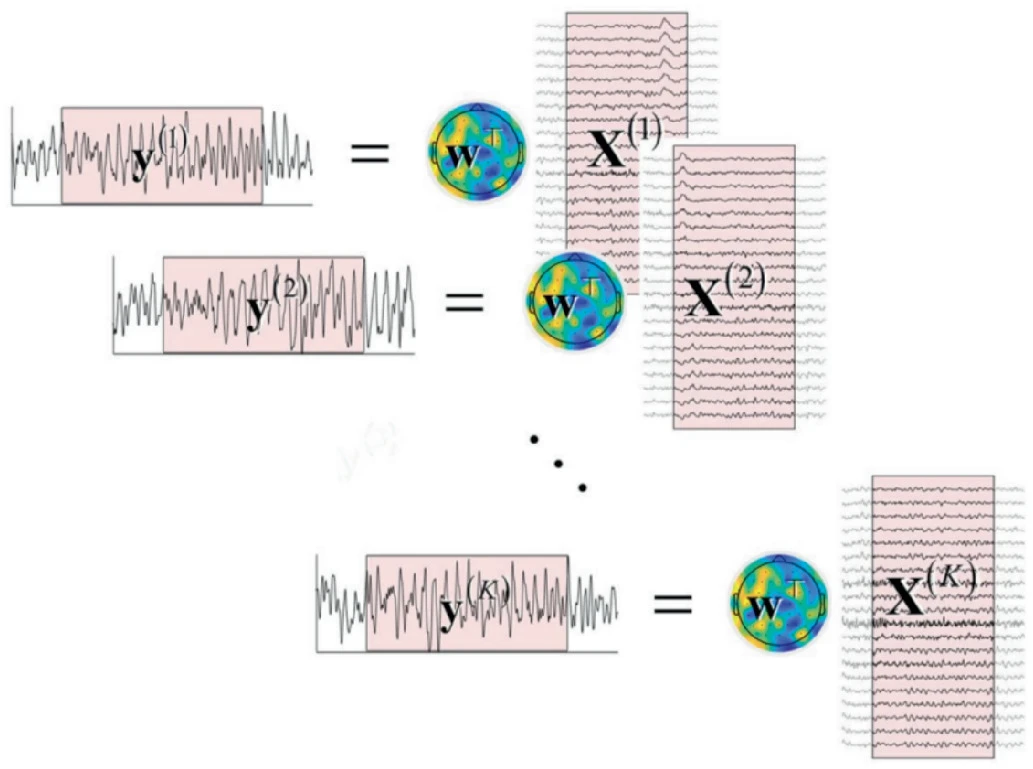
A Comparative Analysis of Time Series Transformers and Alternative Deep Learning Models for SSVEP Classification
Steady State Visually Evoked Potentials (SSVEPs) are intrinsic responses to specific visual stimulus frequencies. When the retina is activated by a frequency ranging from 3.5 to 75 Hz, the brain produces electrical activity at the same frequency as the visual signal, or its multiples. Identifying the preferred frequencies of neurocortical dynamic processes is a benefit of SSVEPs. However, the time
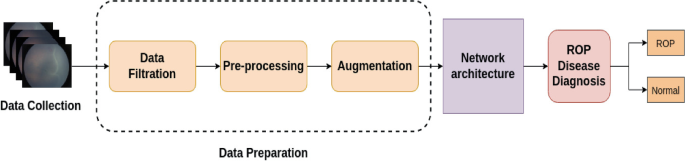
A Robust Deep Learning Detection Approach for Retinopathy of Prematurity
Retinal retinopathy of prematurity (ROP), an abnormal blood vessel formation, can occur in a baby who was born early or with a low birth weight. It is one of the primary causes of newborn blindness globally. Early detection of ROP is critical for slowing and stopping the progression of ROP-related vision impairment which leads to blindness. ROP is a relatively unknown condition, even among medical
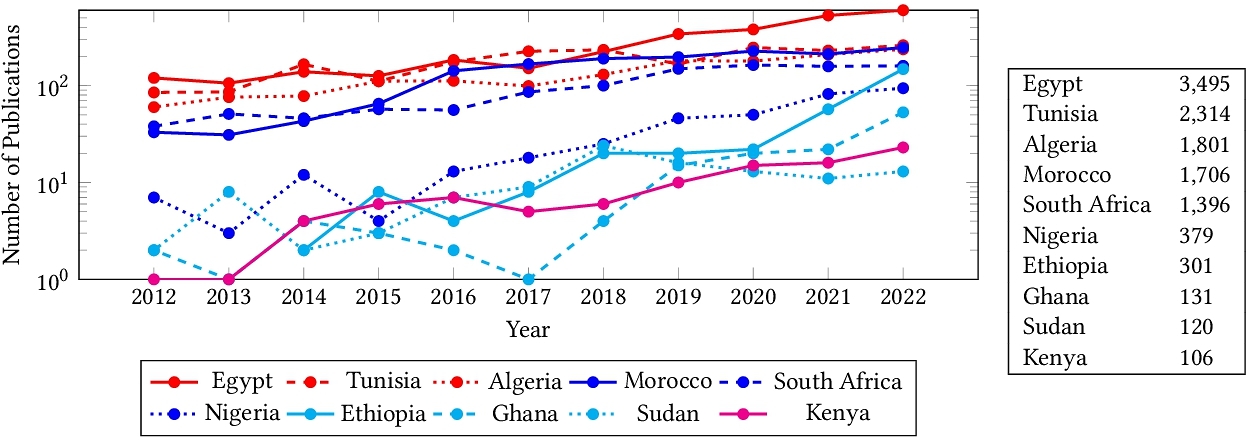
The State of Computer Vision Research in Africa
Despite significant efforts to democratize artificial intelligence (AI), computer vision which is a sub-field of AI, still lags in Africa. A significant factor to this, is the limited access to computing resources, datasets, and collaborations. As a result, Africa's contribution to top-tier publications in this field has only been 0.06% over the past decade. Towards improving the computer vision
Coffee and multiple sclerosis (MS)
Multiple Sclerosis (MS) is a long-term autoimmune disorder affecting the central nervous system, marked by inflammation, demyelination, and neurodegeneration. While the exact cause of MS remains unknown, recent research indicates that environmental factors, particularly diet, may influence the disease's risk and progression. As a result, the potential neuroprotective effects of coffee, one of the
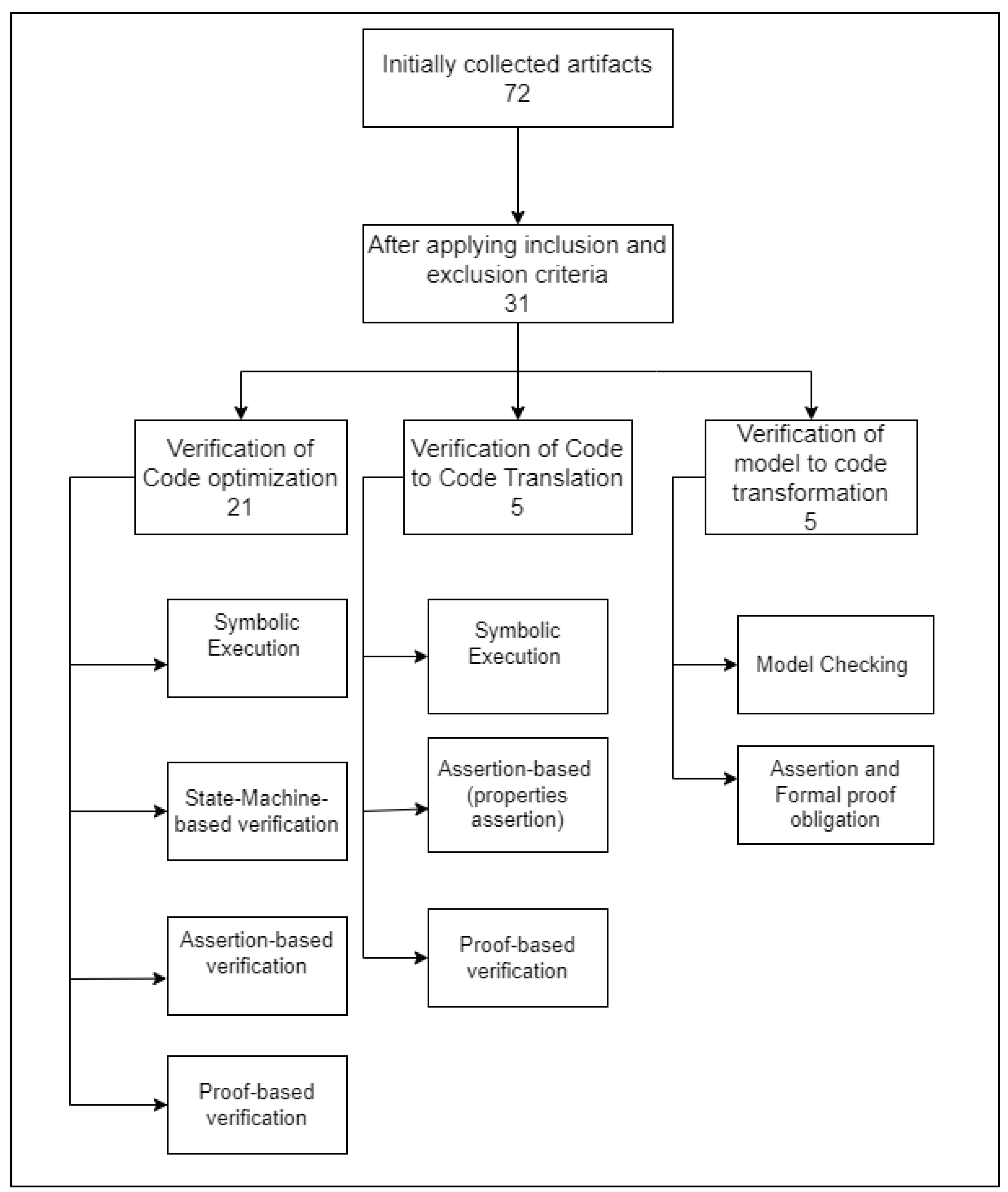
Formal Verification of Code Conversion: A Comprehensive Survey
Code conversion, encompassing translation, optimization, and generation, is becoming increasingly critical in information systems and the software industry. Traditional validation methods, such as test cases and code coverage metrics, often fail to ensure the correctness, completeness, and equivalence of converted code to its original form. Formal verification emerges as a crucial methodology to
Advanced Phishing Detection in Ethereum Blockchain Transactions Using Machine Learning Models
Deceptive phishing attacks greatly endanger blockchain security, tricking miners into adding harmful blocks to the chain. Current methods of detection and agreement protocols are frequently not enough, especially if authorized miners accidentally include these blocks. Despite the potential for improving detection capabilities, the adoption of zero-trust policies is still restricted. This paper