
Filter by
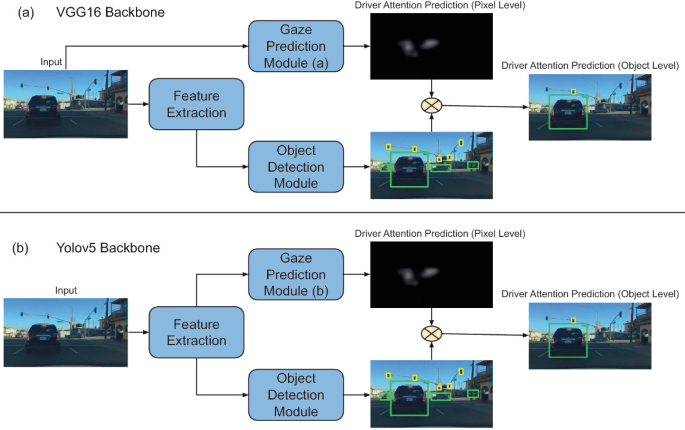
DAP: A Framework for Driver Attention Prediction
Human drivers employ their attentional systems during driving to focus on critical items and make judgments. Because gaze data can indicate human attention, collecting and analyzing gaze data has emerged in recent years to improve autonomous driving technologies. In safety-critical situations, it is important to predict not only where the driver focuses his attention but also on which objects. In
Ambulance Routing Optimization for CT-Ready Hospitals
This paper aims to enhance emergency medical services by optimizing ambulance routes towards hospitals equipped for spiral CT scans with minimal wait times. It integrates real-time data on hospital availability and traffic conditions, utilizing machine learning and smart routing algorithms to predict traffic jams and determine the fastest routes. Additionally, a machine learning model is used to
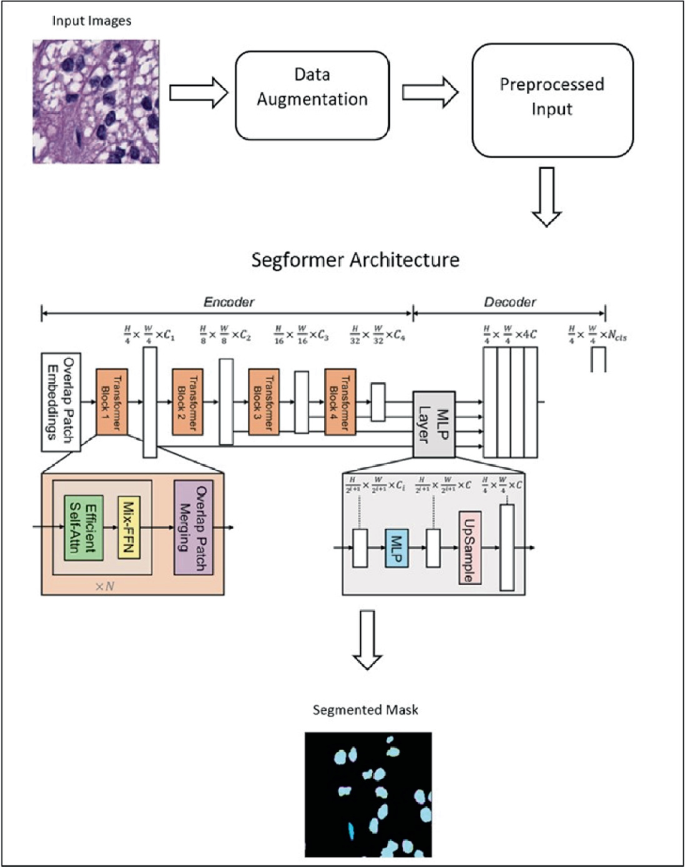
Efficient Semantic Segmentation of Nuclei in Histopathology Images Using Segformer
Segmentation of nuclei in histopathology images with high accuracy is crucial for the diagnosis and prognosis of cancer and other diseases. Using Artificial Intelligence (AI) in the segmentation process enables pathologists to identify and study the unique properties of individual cells, which can reveal important information about the disease, its stage, and the best treatment approach. By using

Uni-Buddy: A Multifunctional AI-Powered Assistant for Enhancing University Life: A Use Case at Nile University
Uni-Buddy is an advanced AI system developed to simplify university life at Nile University. It efficiently handles questions in everyday language, accesses real-time university databases, and simultaneously provides accurate responses for multiple users. Its goals include assisting with course registration, academic advising, financial inquiries, campus navigation, and research support. The
Synthetic to Real Human Avatar Translation via One Shot Pretrained GAN Inversion
This paper tackles the problem of generating pho-torealstic images of synthetically rendered human avatar faces from computer graphics engines, our approach leverages the high capabilities of generative models as StyleGAN that can generate high quality human faces that are hard to distinguish from real human faces images. We present a framework that effectively bridges the gap between synthetic
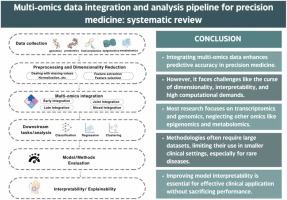
Multi-omics data integration and analysis pipeline for precision medicine: Systematic review
Precision medicine has gained considerable popularity since the “one-size-fits-all” approach did not seem very effective or reflective of the complexity of the human body. Subsequently, since single-omics does not reflect the complexity of the human body's inner workings, it did not result in the expected advancement in the medical field. Therefore, the multi-omics approach has emerged. The multi
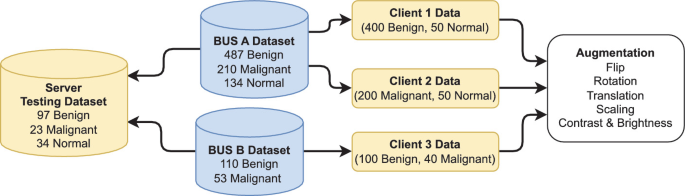
A Novel Approach to Breast Cancer Segmentation Using U-Net Model with Attention Mechanisms and FedProx
Breast cancer is a leading cause of death among women worldwide, emphasizing the need for early detection and accurate diagnosis. As such Ultrasound Imaging, a reliable and cost-effective tool, is used for this purpose, however the sensitive nature of medical data makes it challenging to develop accurate and private artificial intelligence models. A solution is Federated Learning as it is a
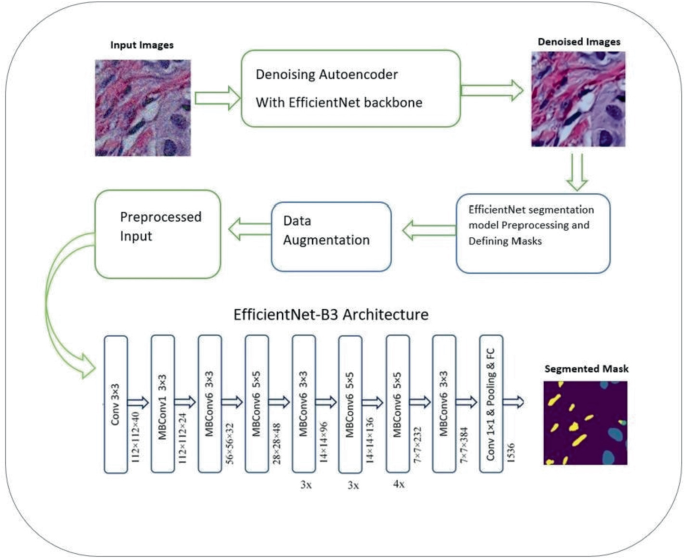
Revolutionizing Cancer Diagnosis Through Hybrid Self-supervised Deep Learning: EfficientNet with Denoising Autoencoder for Semantic Segmentation of Histopathological Images
Machine Learning technologies are being developed day after day, especially in the medical field. New approaches, algorithms and architectures are implemented to increase the efficiency and accuracy of diagnosis and segmentation. Deep learning approaches have proven their efficiency; these approaches include architectures like EfficientNet and Denoising Autoencoder. Accurate segmentation of nuclei
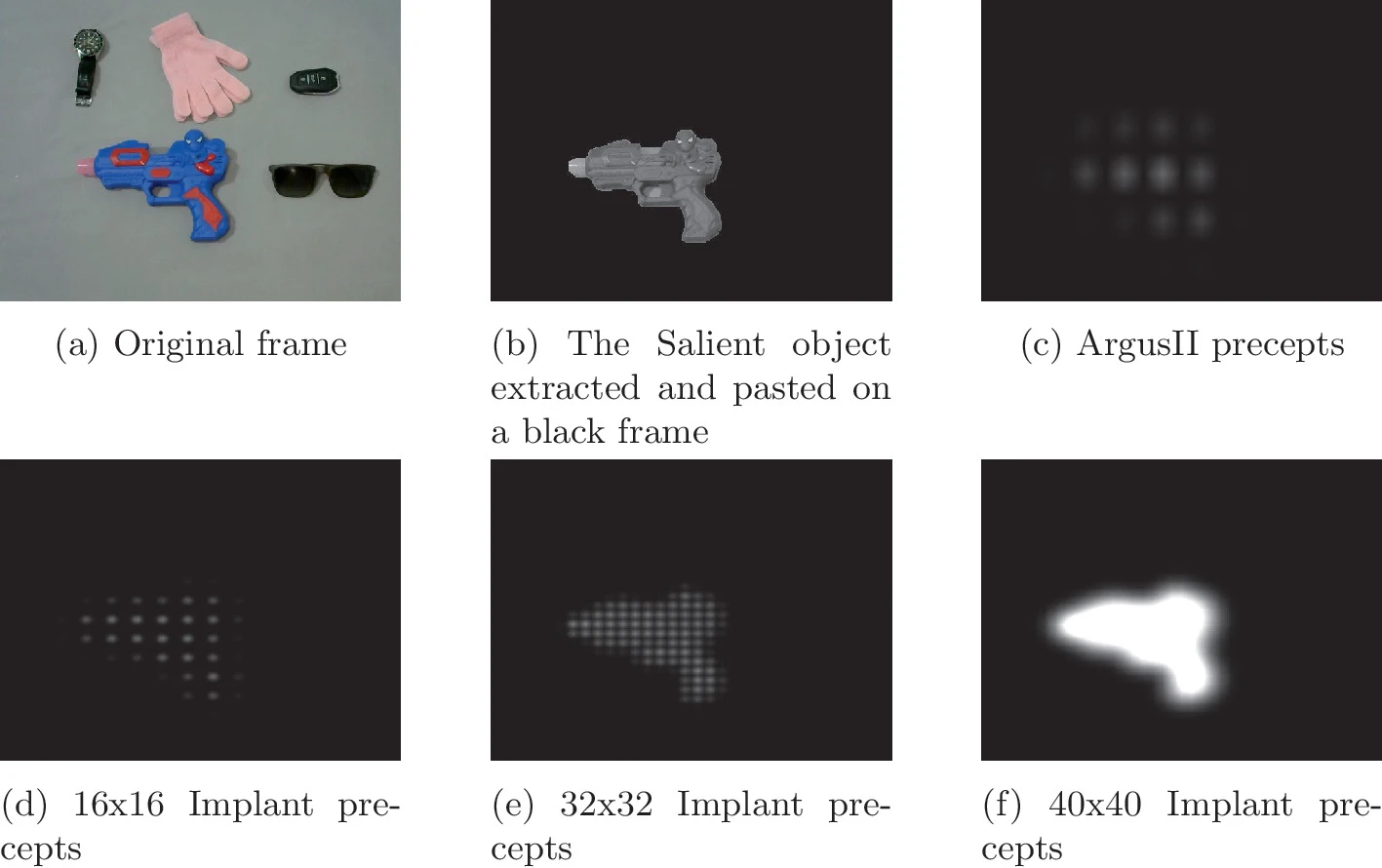
Smart Saliency Detection for Prosthetic Vision
People with visual impairments often have difficulty locating misplaced objects. This can be a major barrier to their independence and quality of life. Retinal prostheses can restore some vision to people with severe vision loss. We introduce a novel real-time system for locating any misplaced objects for people with visual impairments using retinal prostheses. The system combines One For All (OFA
Pharmacotherapy of PD and related movements disorders and their limitations
A wide range of neurodegenerative illnesses, including Parkinson's disease (PD) and related movement disorders, greatly impair the quality of life for those who are afflicted. This chapter provides a comprehensive overview of Parkinson's disease (PD), covering everything from the disease's basic definitions, epidemiology, and pathophysiology to the complex issues involved in treating its symptoms